产品概述
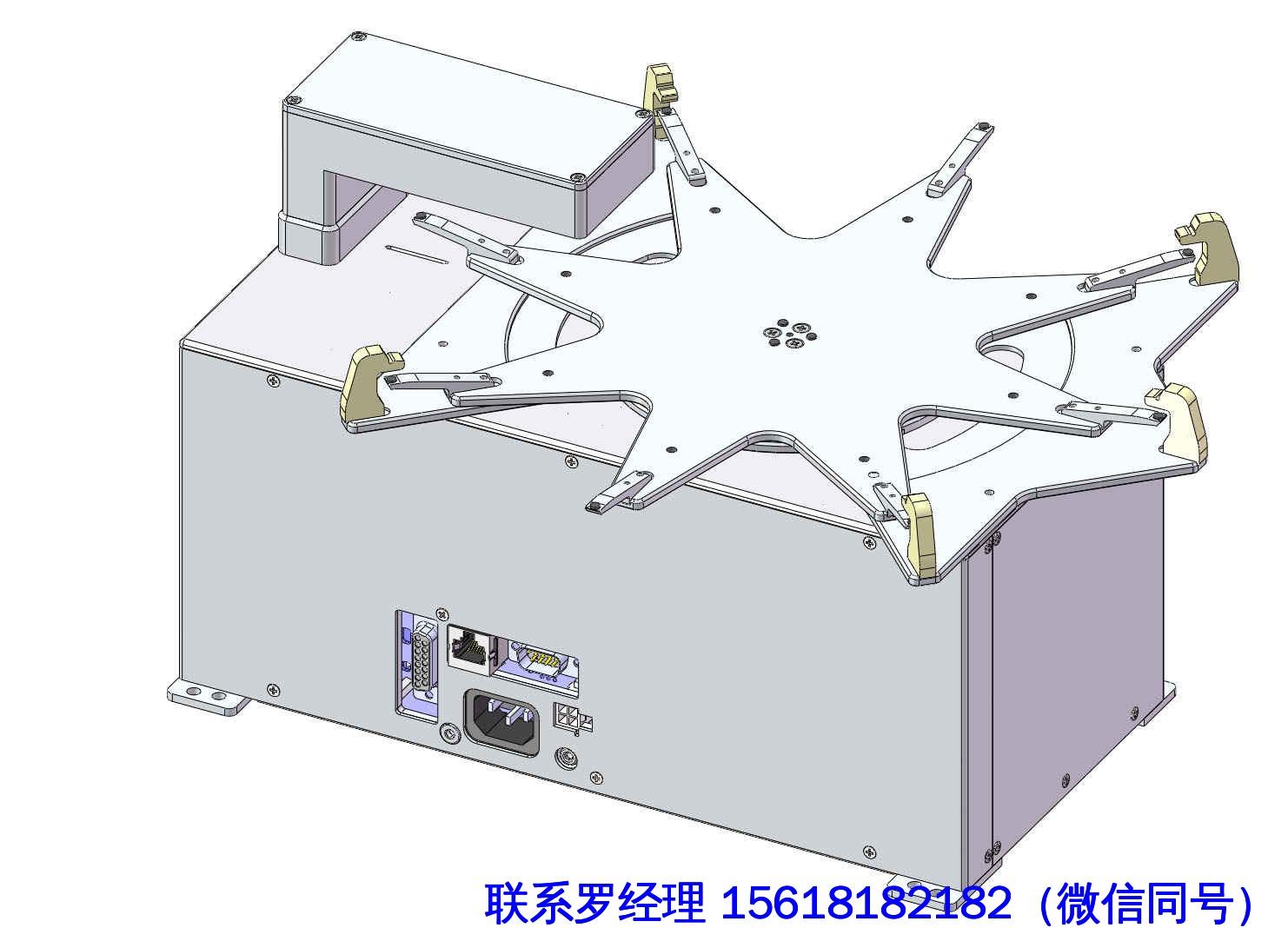
Logosol LRC-X31G3 是一款高性能多轴机器人控制器,专为半导体晶圆搬运机器人、多轴自动化设备和精密定位系统设计。该控制器采用先进的多轴协同控制算法,支持多种机器人运动学模型,可实现对 Diamond 系列晶圆搬运机器人的精确控制。LRC-X31G3 集成了 Logosol 在半导体自动化领域的丰富经验,为用户提供稳定、高效的运动控制解决方案。
核心特点
- 多轴协同控制:支持 3-6 轴同步控制,内置 SCARA 和多关节机器人运动学解算
- 高速实时通信:采用 EtherCAT 总线,最小控制周期 125 μs,确保多轴同步精度
- 内置机器人算法:支持直线插补、圆弧插补、点到点运动等多种运动模式
- 丰富的 I/O 接口:集成多路数字 I/O、模拟量和编码器接口
- 支持 Diamond 机器人:内置 Diamond H 系列机器人运动学参数
- 用户友好的编程环境:提供图形化编程界面和 C 语言 API 接口
型号规格
| 型号 | 控制轴数 | 通信接口 | 编程方式 | I/O 接口 | 安全功能 |
|---|---|---|---|---|---|
| LRC-X31G3-A | 3 轴 | EtherCAT, RS-232 | 图形化编程, C API | 16 DI / 12 DO | STO, 软限位 |
| LRC-X31G3-B | 4 轴 | EtherCAT, EtherNet/IP | 图形化编程, C API, PLC | 24 DI / 16 DO | STO, 软限位, 碰撞检测 |
| LRC-X31G3-C | 6 轴 | EtherCAT, EtherNet/IP, CANopen | 图形化编程, C API, PLC | 32 DI / 24 DO, 模拟量 | STO, 软限位, 碰撞检测, 安全限速 |
通用参数
| 参数 | 规格 |
|---|---|
| 供电电压 | DC 24 V (±10%) |
| 操作系统 | 实时 Linux |
| 控制周期 | 最小 125 μs (EtherCAT) |
| 存储容量 | 256 MB Flash, 128 MB RAM |
| 数字输入/输出 | 16 ~ 32 DI / 12 ~ 24 DO |
| 工作温度范围 | 0 °C ~ +55 °C |
| 认证标准 | CE |
| 适用机器人 | Diamond H 系列晶圆搬运机器人 |
典型应用
- 半导体晶圆搬运机器人的运动控制
- 多轴自动化设备的精密定位与路径规划
- 设备前端模块(EFEM)的机器人控制系统
- 晶圆检测设备的自动上下料控制
- 洁净室环境下的多轴协同作业
- 半导体封装与测试设备的自动化控制
关于元锤
元锤是一家专注于进口工业仪器与自动化设备的技术服务商,致力于为中国半导体、精密制造和科研领域提供高品质的进口设备、选型咨询与技术支持服务。
作为美国 Logosol 在中国区域的授权合作伙伴,元锤为用户提供 Logosol 全系列产品的选型咨询、技术支持和售后保障。如需了解产品详情或获取报价,欢迎联系我们,或访问关于元锤页面了解更多信息。